|
| void | StartOS (void) |
| |
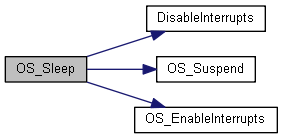
| void | OS_EnableInterrupts (void) |
| |
| void | OS_DisableInterrupts (void) |
| |
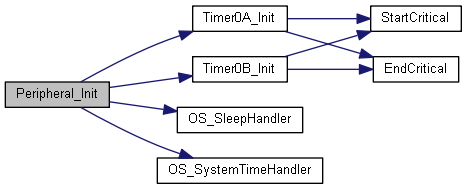
| void | OS_SystemTimeHandler (void) |
| |
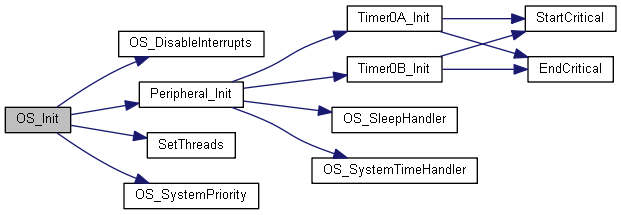
| void | Peripheral_Init (void) |
| | This function initializes extra IO used by OS, add new inits here. More...
|
| |
| void | OS_SystemPriority (void) |
| | Set priority of Systick and PendSV (Context Switch handlers) More...
|
| |
| void | OS_Init (void) |
| | initialize operating system, disable interrupts until OS_Launch initialize OS controlled I/O: serial, ADC, systick, LaunchPad I/O and timers More...
|
| |
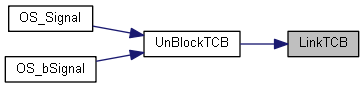
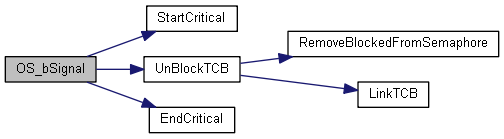
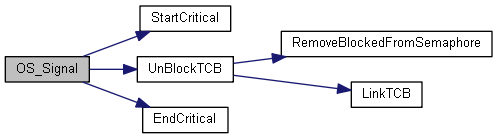
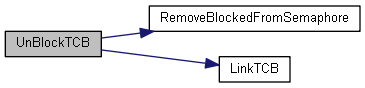
| void | LinkTCB (tcbType *newThread) |
| | LinkTCB Add TCB to doubly Linked List, copy pasta ee 312. More...
|
| |
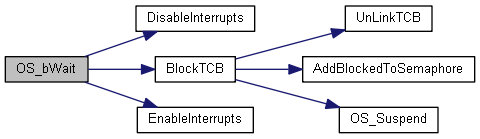
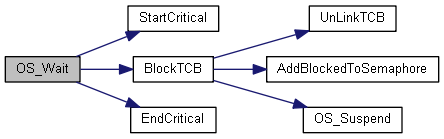
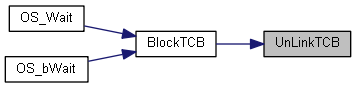
| void | UnLinkTCB (void) |
| | UnLinkTCB Remove thread form Doubly LL of TCB, copy pasta. More...
|
| |
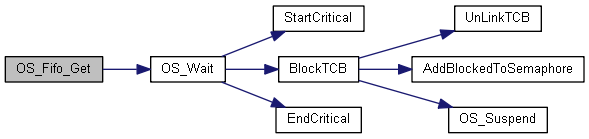
| void | AddBlockedToSemaphore (Sema4Type *semaPt) |
| | Add TCB to blocked Linked list of semaphore. More...
|
| |
| tcbType * | RemoveBlockedFromSemaphore (Sema4Type *semaPt) |
| | Remove TCB from blocked list, assuiming thread already blocked, else rip program. More...
|
| |
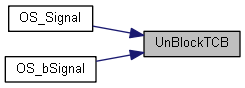
| void | UnBlockTCB (Sema4Type *semaPt) |
| | Remove TCB from blocked list. More...
|
| |
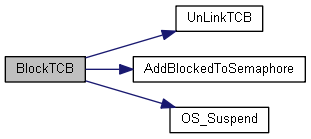
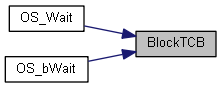
| void | BlockTCB (Sema4Type *semaPt) |
| | Add current TCB to blocked list then yield, ratatatat. More...
|
| |
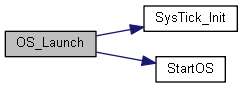
| void | OS_Launch (INT32U theTimeSlice) |
| | This function starts the scheduler and enables interrupts. More...
|
| |
| void | OS_Scheduler (void) |
| | This function runs next highest priority thread, PRIORITY SCHEDULER. More...
|
| |
| void | SysTick_Handler (void) |
| | This function decides next thread to run. More...
|
| |
| void | OS_Suspend (void) |
| | This function suspends current thread by forcing context switch call. More...
|
| |
| void | OS_AddPriorityThread (tcbType *newThread) |
| | This function decides next thread to run, now uses priority scheduler. More...
|
| |
| INT8 | OS_AddThread (void(*task)(void), INT32U priority) |
| | This function decides next thread to run, now uses priority scheduler. More...
|
| |
| INT32U | OS_IdThread (void) |
| | Get current thread ID. More...
|
| |
| void | OS_InitSemaphore (Sema4Type *semaPt, INT32 value) |
| | Initialize semaphore to given value. More...
|
| |
| void | OS_Wait (Sema4Type *semaPt) |
| | semaphore value decrement More...
|
| |
| void | OS_Signal (Sema4Type *semaPt) |
| | This function(Spinlock) will signal that a mutual exclusion is taking place in a function. More...
|
| |
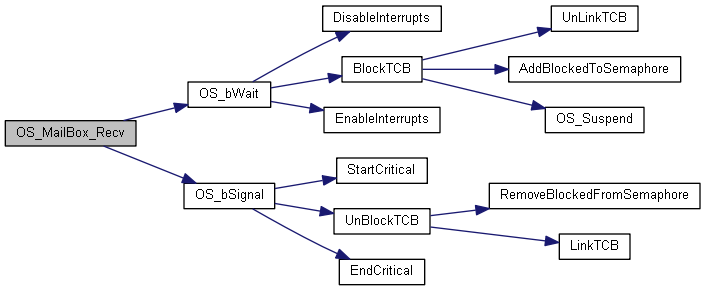
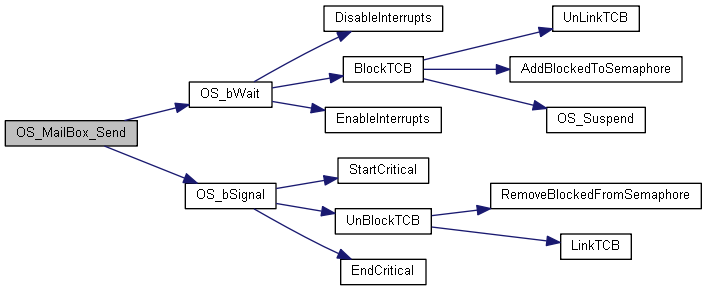
| void | OS_bWait (Sema4Type *semaPt) |
| | This function implements binary wait. More...
|
| |
| void | OS_bSignal (Sema4Type *semaPt) |
| | This function implements binary signal. More...
|
| |
| void | OS_Sleep (INT32U sleepTime) |
| | This function puts a thread to sleep. More...
|
| |
| void | OS_Kill (void) |
| | This function kill/deletes current thread from schedule. More...
|
| |
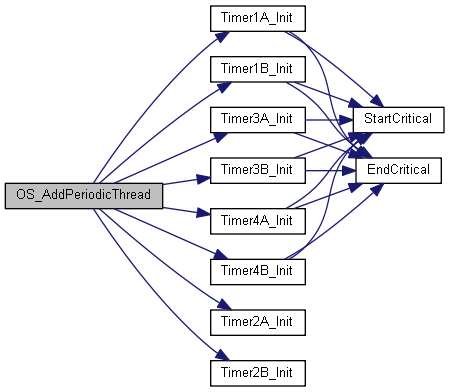
| INT8 | OS_AddPeriodicThread (void(*task)(void), INT32U period, INT32U priority) |
| | Adds periodic background thread. Cannot spin, sleep, die, rest, etc. cause it's ISR, depends on hardware for number of tasks possible No ID for this thread, must have mid-high priority to run properly. More...
|
| |
| INT8 | OS_AddSW1Task (void(*task)(void), INT32U priority) |
| | This function adds a thread to run and its priority when a button is pressed. More...
|
| |
| INT8 | OS_AddSW2Task (void(*task)(void), INT32U priority) |
| | This function adds a thread to run and its priority when a button is pressed. More...
|
| |
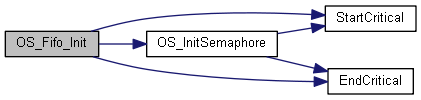
| void | OS_Fifo_Init (void) |
| |
| INT8 | OS_Fifo_Put (FIFO_t data) |
| |
| FIFO_t | OS_Fifo_Get (void) |
| |
| INT32U | OS_Fifo_Size (void) |
| | Gets current size of FiFo. More...
|
| |
| void | OS_MailBox_Init (void) |
| | Initializes communication channel for OS. More...
|
| |
| void | OS_MailBox_Send (INT32U data) |
| | This function will be called from a foreground thread It will spin/block if the MailBox contains data not yet received. More...
|
| |
| INT32U | OS_MailBox_Recv (void) |
| | This function will be called from a foreground thread It will spin/block if the MailBox is empty. More...
|
| |
| INT32U | OS_Time (void) |
| |
| INT32U | OS_TimeDifference (INT32U start, INT32U stop) |
| |
| void | OS_ClearMsTime (void) |
| |
| INT32U | OS_ReadMsTime (void) |
| |
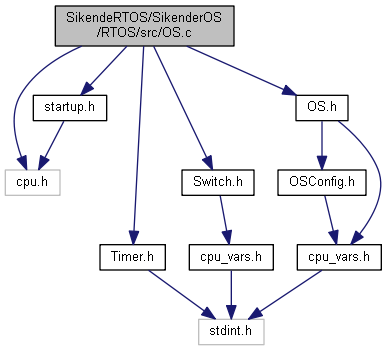
Contains functions to run OS.
Definition in file OS.c.